autonomoustrafficcontrol
a CV pipeline that reads live traffic video, counts vehicles per lane, and gives green time proportional to demand. tested at a real intersection. built from scratch, twice.
githubthe algorithm
adaptive phase scheduling
green time is proportional to lane density. the busiest pair of approaches gets more time. empty lanes don't block busy ones.
fixed timing would give equal time to all lanes regardless of demand — wasting cycles on empty approaches
detection output
yolo sees every lane.
YOLOv8 draws bounding boxes per vehicle and per lane mask. the count feeds directly into the timing model.

five years apart
2019 prototype
hardware-first
a Raspberry Pi driving a physical intersection simulator. IR sensors and Logitech webcams estimated lane density. real hardware in the loop, real GPIO signals.
built with Debayan. got picked up by the Times of India.
2024 revamp
computer vision
rebuilt as a full CV pipeline. video in, detections out, per-lane counts, adaptive timing decisions. tested on a real intersection in Kolkata. solo rebuild.
the goal was the same as 2019: stop empty lanes from blocking busy ones. the approach became a lot more accurate.
press
times of india.
the 2019 prototype got picked up by the Times of India. for a student project that started as a Raspberry Pi experiment, that was a big moment.
the coverage focused on the practical angle — a low-cost system that could help at intersections where traditional infrastructure is expensive or unavailable.
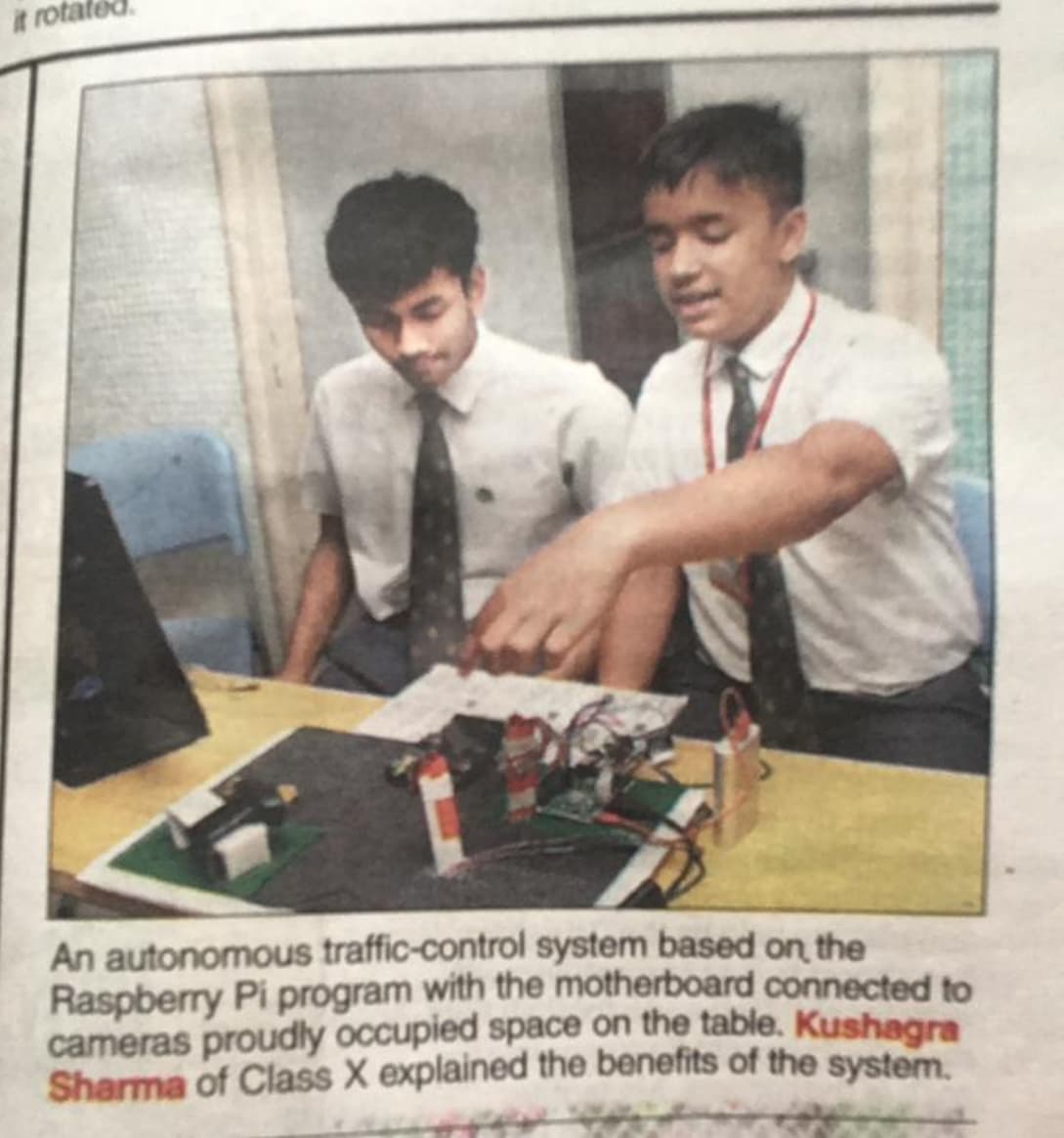
team · 2019 build
two people, one Raspberry Pi, one real intersection.